FAQs
设计与选型
我们提供多种不同尺寸、电压、功率等级和控制接口的电机驱动模块。您可以通过我们的产品选择器来挑选需要的模块:伺服驱动模块。选择器会根据您设置的筛选条件显示出符合条件的模块:
PCB 类型:根据模块功能进行分类,您可以根据此筛选条件快速找到所需的模块。
电机尺寸:选择正确的电机法兰尺寸,以确保模块能够恰当地安装在上面。
控制接口:根据应用需求选择合适的接口,可选控制接口包括 RS485、CANopen、I/O、EtherCAT 等。
电压:此筛选条件显示伺服系统能够承受的最小电压和最大电压。
连续功率:此筛选条件描述模块的连续功率。
运行模式:选择应用所需的模式,可选运行模式包括速度/位置控制、归零等。
完成筛选条件配置后,选择器会在下方表格中显示所有符合条件的模块。点击产品型号可跳转至产品详情页面。此外,我们还提供相应的 3D模型以帮助您设计机械部件。
请检查模块或一体化伺服电机规格书中的典型电压和功率。
所选电源的输出电压范围应覆盖产品的典型电压。
与此同时,由于电源可能产生尖峰,建议电源的输出功率为产品最大连续输出功率的 3 倍以上。输入电源不足可能会触发伺服系统的欠压保护,从而导致系统复位。
请检查一体化伺服电机规格书中的电压范围。如果提供的电源电压在此电压范围内,则电机能够正常工作。
通常情况下,电机速度与电压成正比。在上述情况下,电机可能无法达到标称最大速度。
输出功率也与电压成正比,如果电源电压低于典型值,则电机的最大功率也会降低。
k1 =(电机速度)/(执行器速度),其中电机速度是电机输出的标称速度,执行器速度是应用实际需要的标称速度。
k2 =(执行器扭矩)/(电机扭矩),其中电机扭矩是电机输出的标称扭矩,执行器扭矩是应用实际需要的标称扭矩。
k 为减速比。
依据 k2 < k < k1 的规则来选择减速比 k。
视情况而定。40mm 和 42mm 的电机和模块是兼容的,57mm 和 60mm 的电机和模块也是兼容的,但 40mm的模块与 57mm的电机不兼容。其他组合也遵循类似的规则。
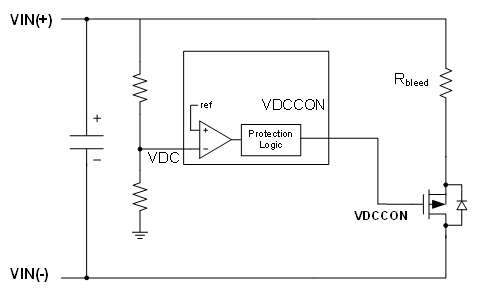
再生能量会导致直流电压上升,当此电压过高时可能会损坏设备。在这种情况下,可以添加一个由功率 MOSFET 控制的能量调度电阻来吸收能量。当控制器检测到电压上升时,会导通MOSFET以防止直流电压过高。
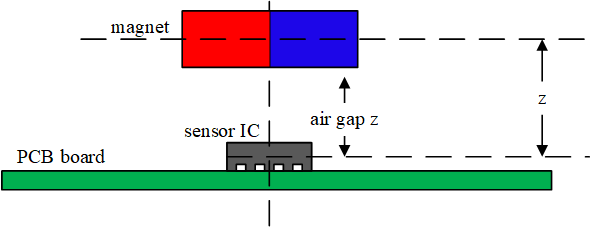
EZmotion模块使用磁性位置传感器来检测转子的位置,因此磁铁必须安装在电机后轴的中心。
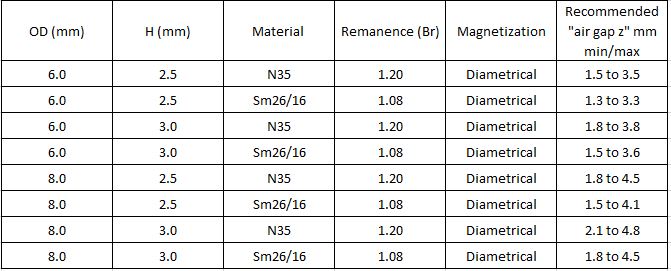
选择磁铁:建议选用直径为6 或 8 mm、高度为2.5 至 3mm、剩磁强度在1.0 至 1.2 T范围内的烧结NdFeB 或 SmCo磁铁。磁铁的直径取决于采用的电机轴和固定支架设计。同时,请确保磁铁为径向充磁。
设计气隙:磁铁与传感器表面的气隙间距设置应满足磁场强度在 30mT 至 80mT范围内的要求,并且磁铁中心与模块中心需对齐。可以根据下面的参考表格来选择推荐的磁铁规格。
循环冗余校验 (CRC) 是常用于数字网络和存储设备中检测突发错误的方法。CRC 基于数据段的多项式除法余数,在传输的数据帧中附加一个固定长度的短校验值。接收端会重新计算校验值;如果两者不匹配,则采取纠正措施以防止数据损坏。
循环冗余校验 (CRC) 的得名一方面基于冗余的校验值,它扩展了数据帧但没有增加新的有效信息,另一方面源于循环码。
CRC 功能默认启用,无需额外操作。
检测到 CRC 错误意味着数据不可靠,EZmotion 伺服系统会忽略此数据帧,也不向主机发送响应,但这会导致主机设备的超时事件。主机设备随后会对超时事件做出反应,以避免设备陷入连续等待状态。
EZmotion 采用CRC-16 作为参数模型,其生成多项式为 0x8005。
故障排除
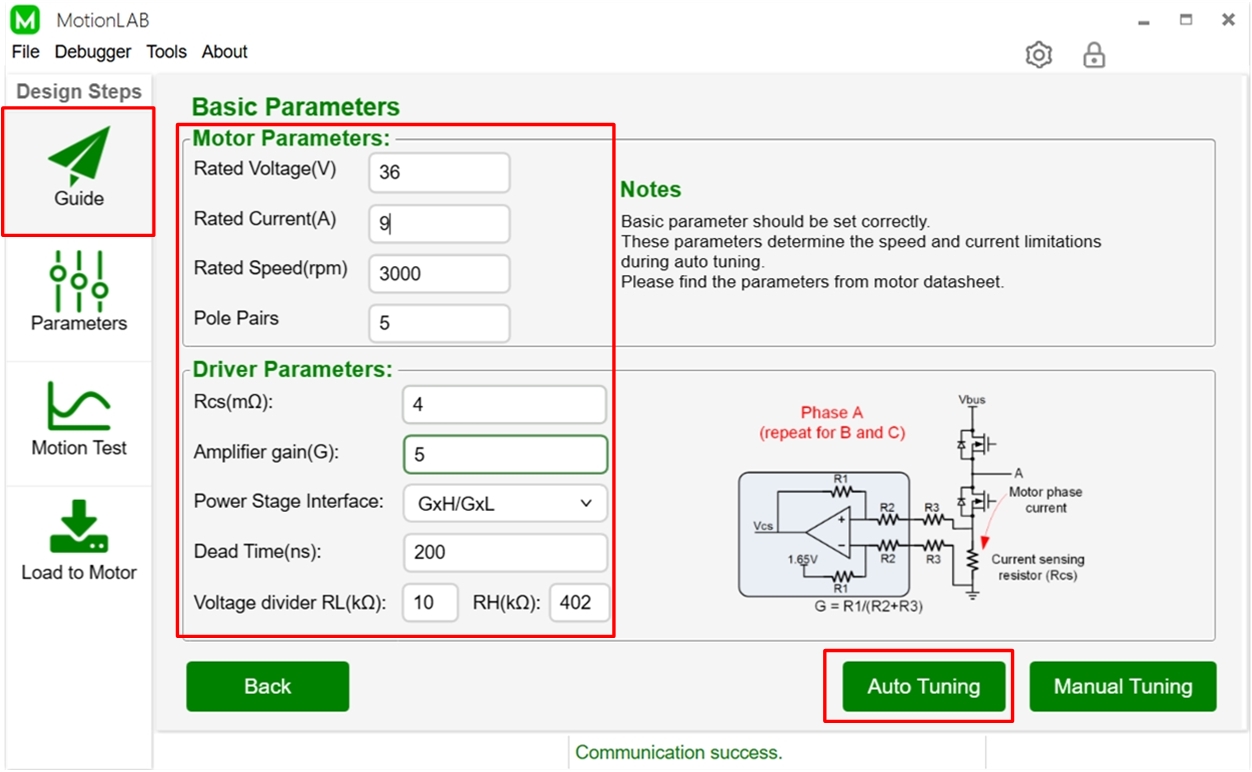
我们提供参数识别和环路自动调谐方法,用于自动调整控制环路参数。您可以在MotionLAB的“Guide”页面上使用此功能。点击此处了解如何设置 MotionLAB。
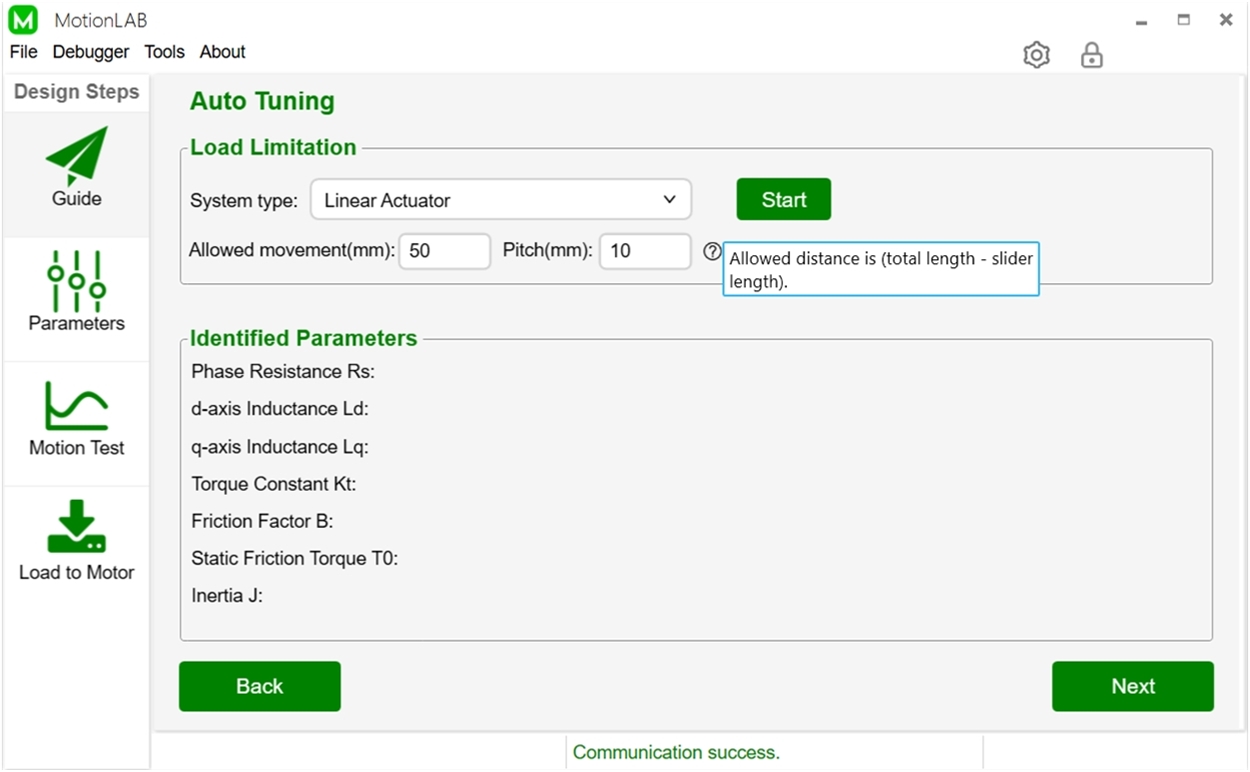
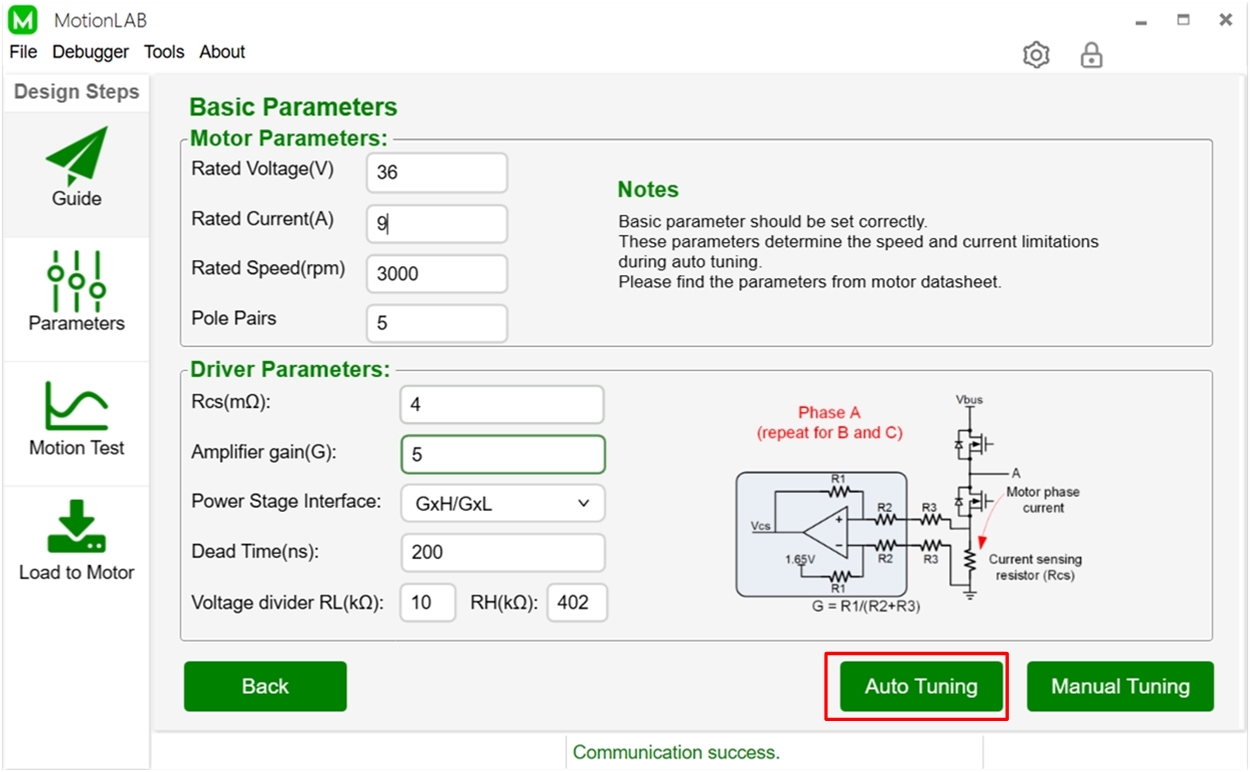
步骤 1: 在自动调谐前正确设置基本参数。设置完成后,点击“Auto Tuning”按钮进入下一页。
步骤 2:选择系统类型并设置相应参数,然后点击“Start”。电机会运行几秒钟,识别出的参数将更新。自动调谐完成后,点击“Next”将显示基本和详细参数页面。
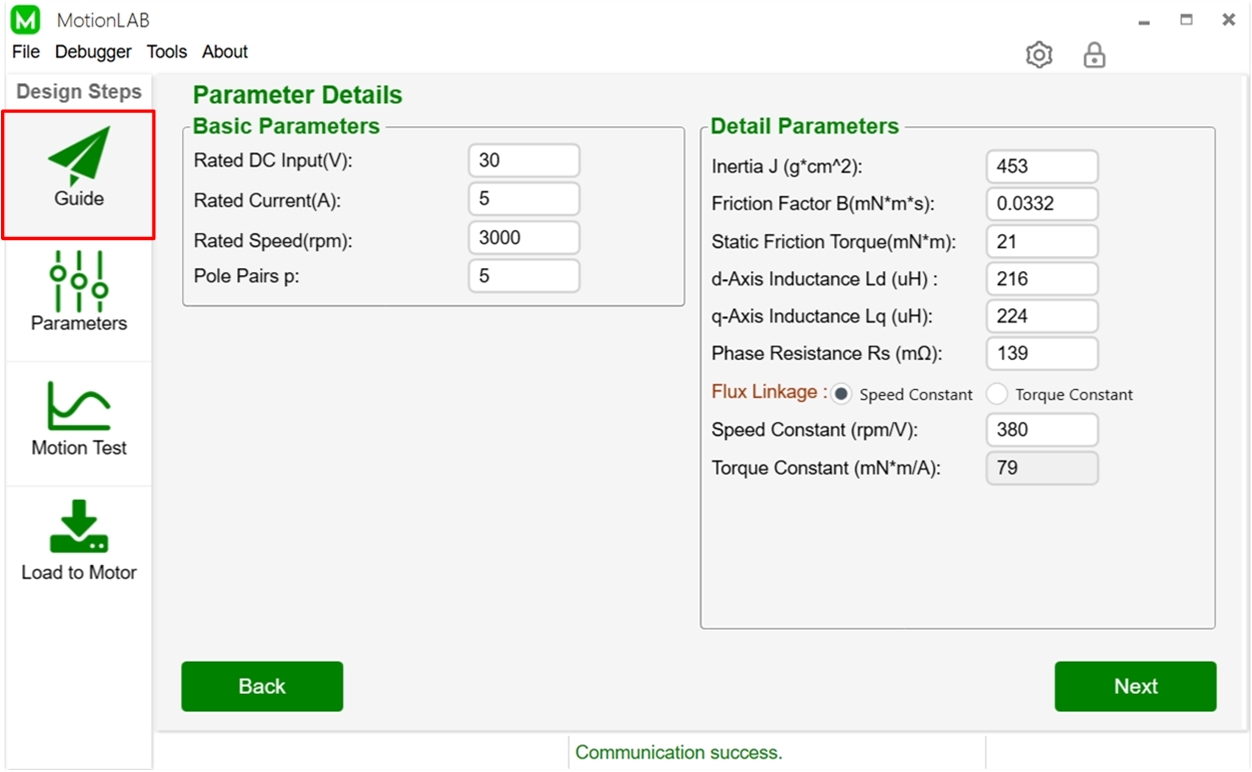
步骤 3:参数详请页将显示伺服系统的基本参数和详细参数。这些参数可手动调整。
自动调谐方法会根据给定的带宽和估计的电机参数自动计算并设置控制环路参数,无需进行任何额外的操作。
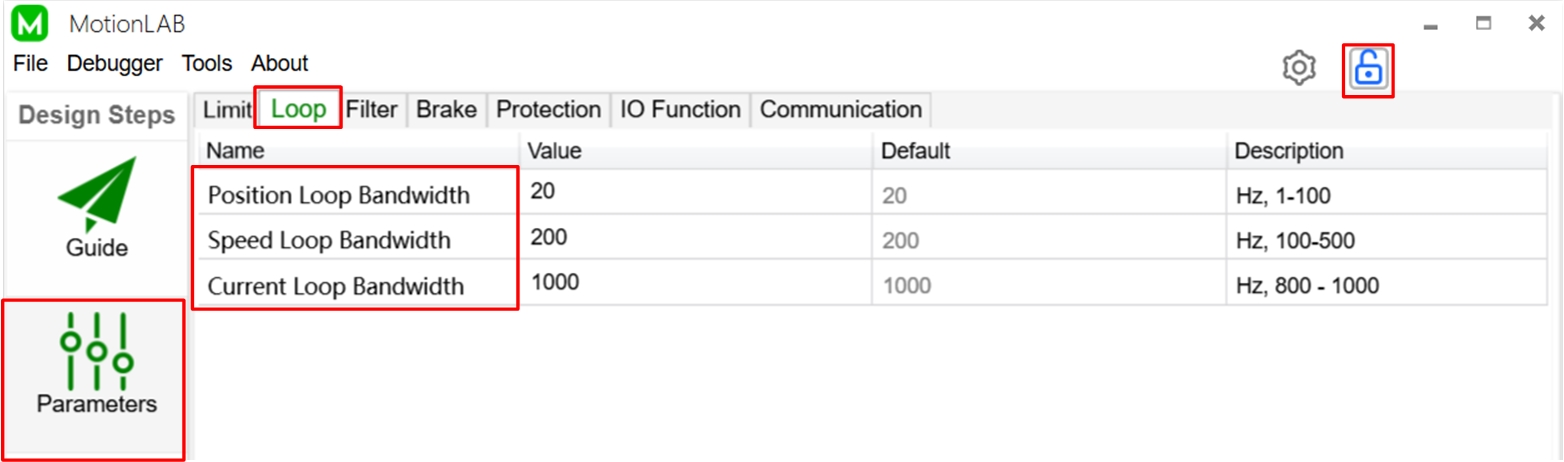
选择环路带宽时,需要进行以下权衡:更高的速度和位置环路带宽会带来更好的动态响应,但也会导致更多振动和噪声。
对于电流环路:电流环路是最内层的环路,其输入是电流命令,输出是电压参考。建议在 1kHz 至 2kHz范围内设置带宽,并从1kHz开始。
对于速度环路:速度环路的输入为速度命令,输出是电流环路的参考。建议在50Hz 至 400Hz范围内设置带宽,并从200Hz开始。速度环路带宽应为电流环路带宽的 5至10 倍。
对于位置环路:位置环路是最外层的环路,用于控制电机位置。其输入是位置命令,输出是速度环路的参考。建议在10Hz 至 100Hz范围内设置带宽,并从 50Hz 开始。位置环路带宽应为速度环路带宽的 5至10 倍。
通过 Monolithic MotionLAB的“Parameters”页面可对上述参数进行设置。设置完成后可将设计保存到文件,或在“Load to Motor”页面上将其下载至电机。
有两种方法可以最小化位置跟随误差。
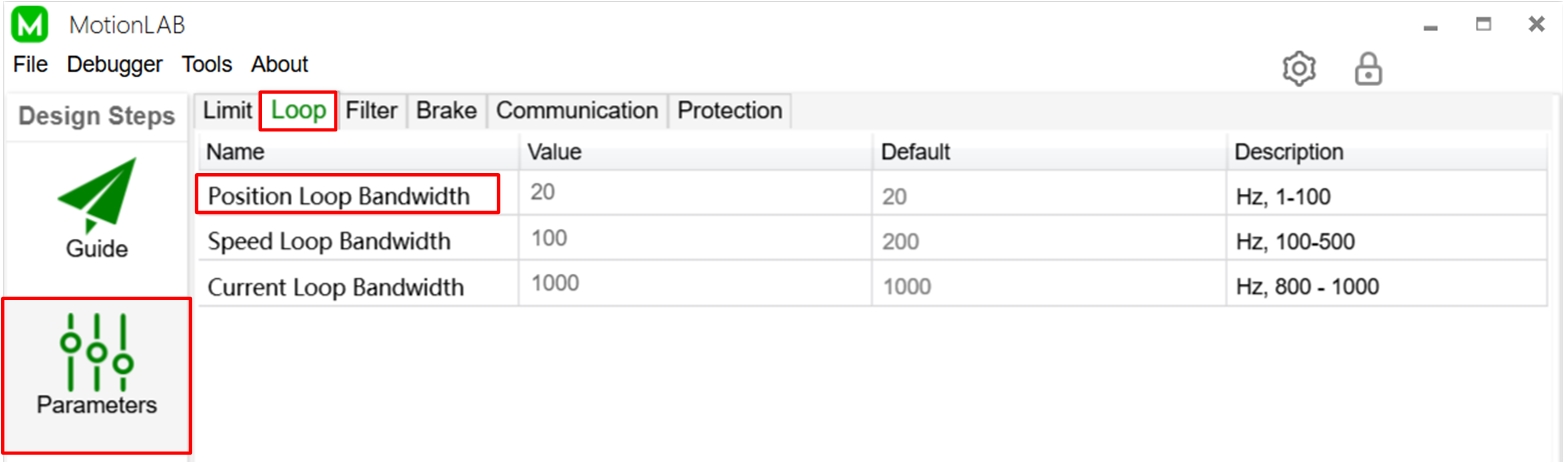
一种方法是增加控制环路带宽,从而使电机对位置命令的响应更迅速。您可以使用 MotionLAB 来设置位置控制环路的带宽,并根据描述中的默认值和建议范围调整该参数。但请注意,更高位置带宽会带来更好的动态响应,但也会导致更多振动和噪声。
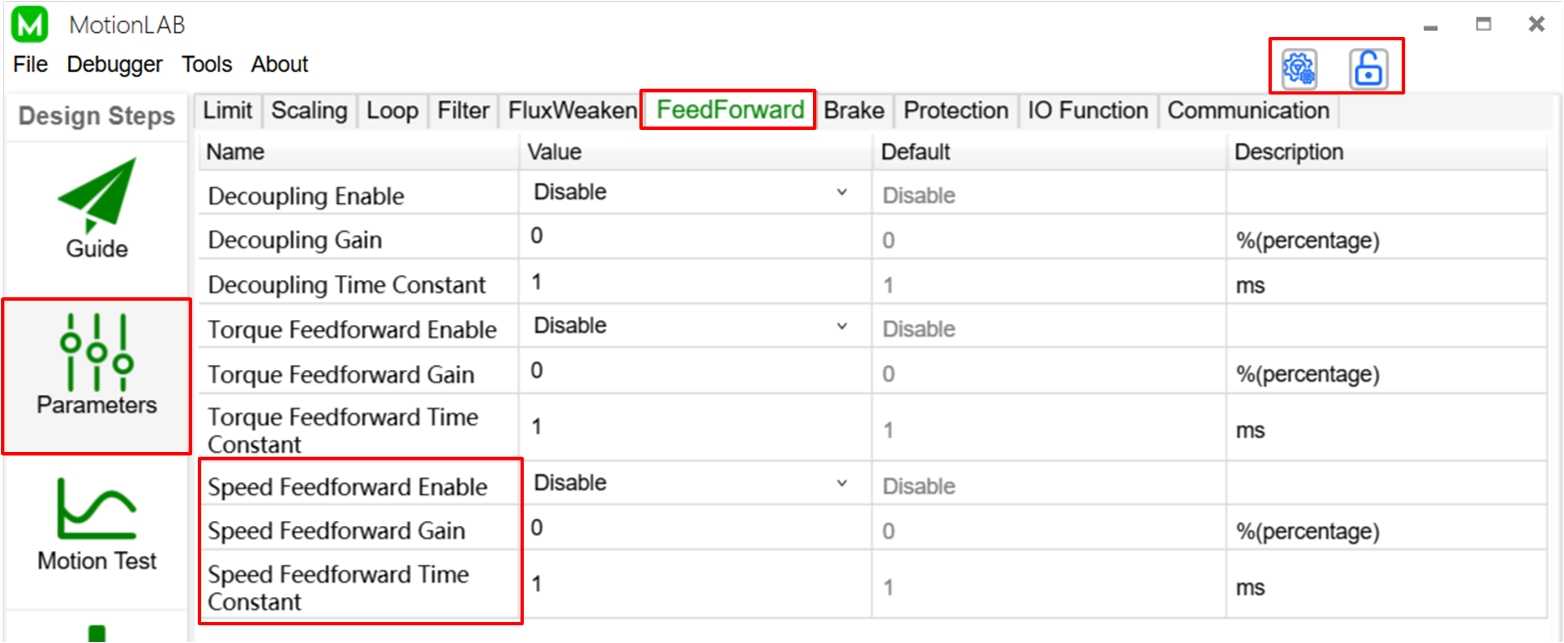
另一种方法是使用前馈控制。通过速度前馈可最小化位置跟随误差。如下图所示,如果位置参考发生变化,速度参考也会立即变化,不存在位置控制环路的延迟。在MotionLAB 的“Parameters”页面上可以启用速度前馈功能并设置增益(百分比)和时间常数(毫秒)。点击“Basic/Advanced Settings”按钮以显示高级参数,并点击“Lock/Unlock Parameters”按钮解锁,然后即可在“FeedForward”部分设置“Speed Feedforward Enable/Gain/Time constant”。

配置完成后,可以在“Motor Test”页面评估位置跟踪性能,并将设置保存到文件,或在“Load to Motor”页面将设置下载至电机。
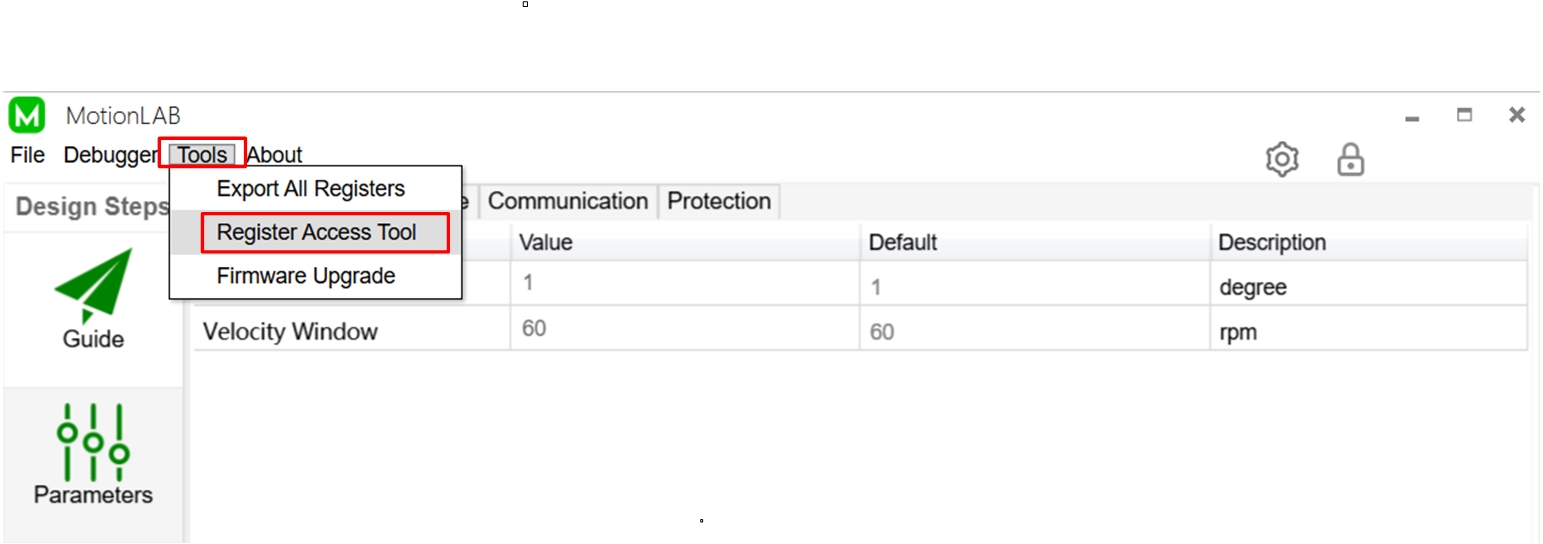
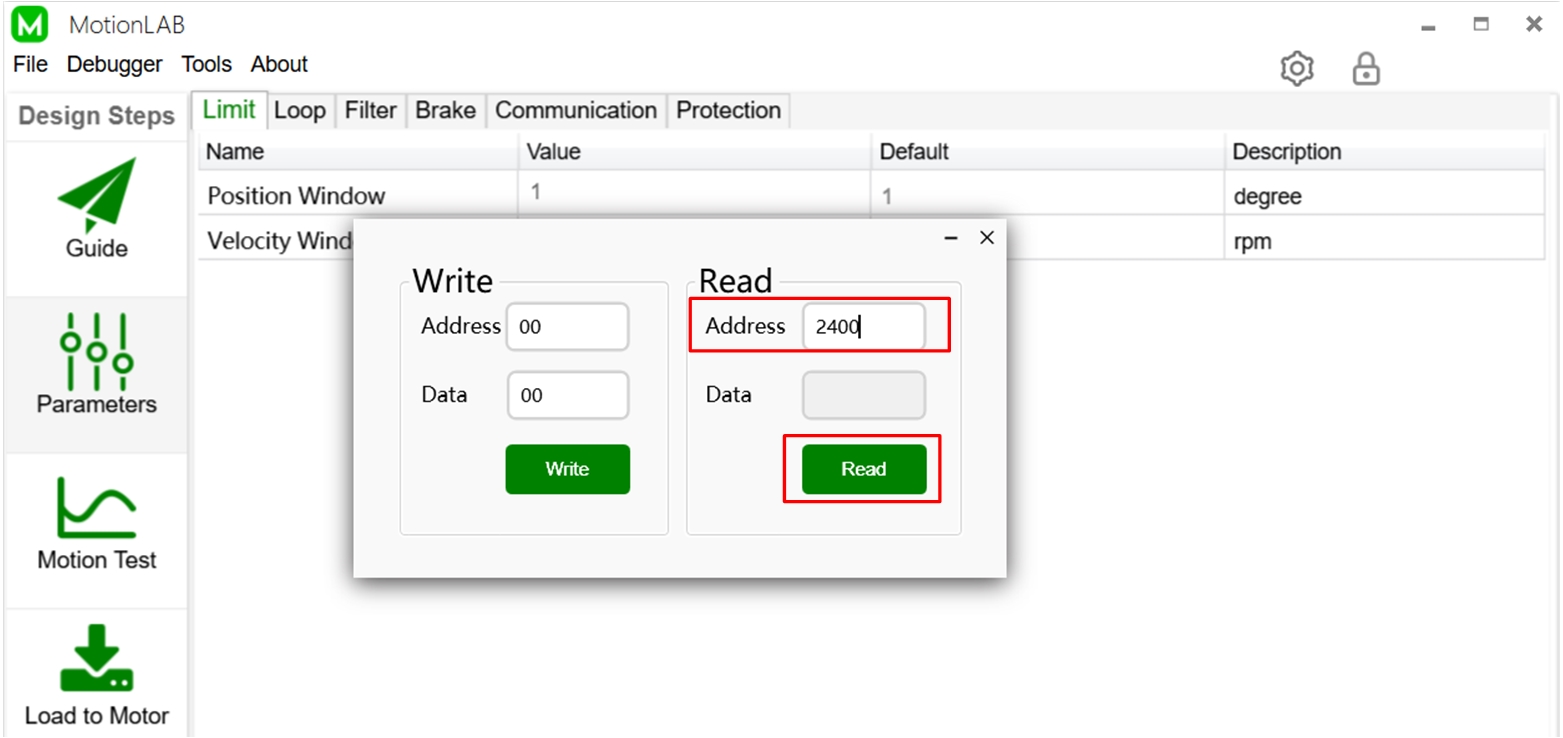
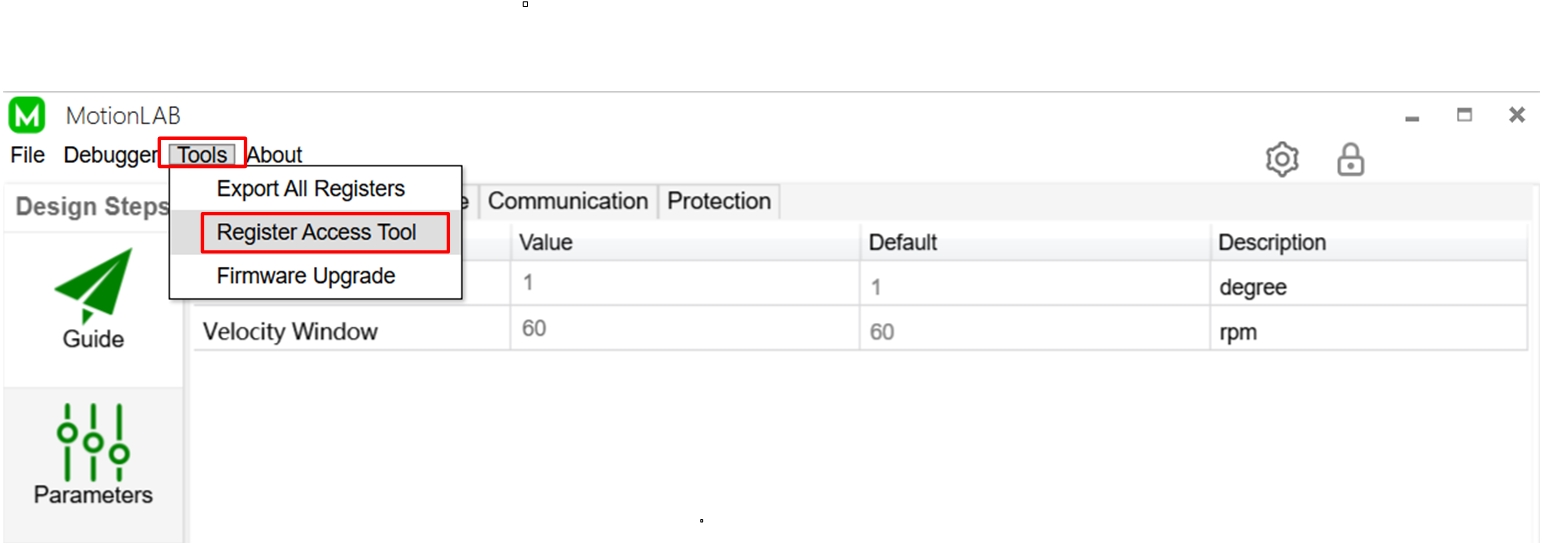
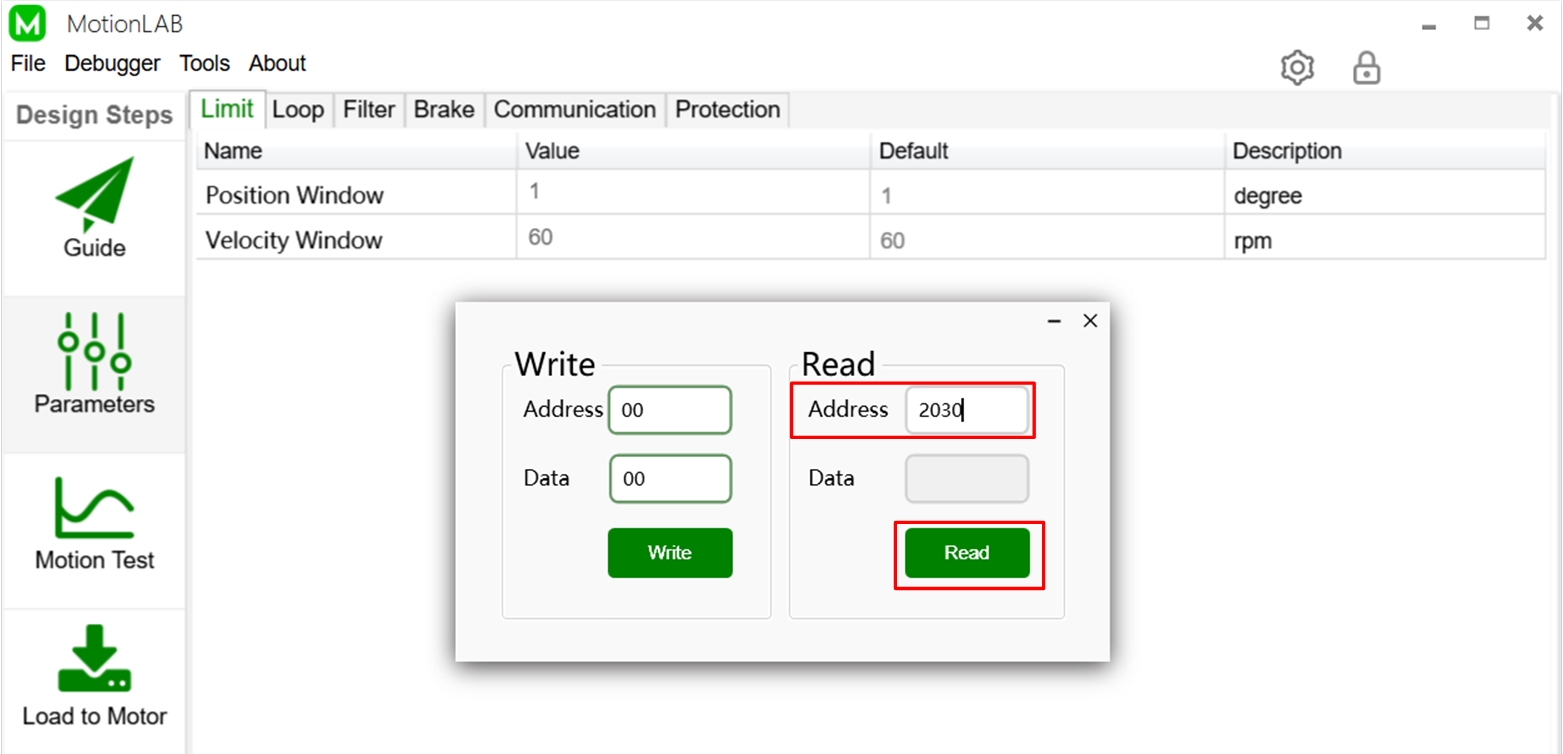
伺服电机运行时,通常功率级的温度最高。因此,我们将温度传感器放置在此处来监控运行温度。进入Tools ->Register Access Tool可以读取运行温度。输入温度的寄存器地址并点击“Read”按钮,“Data”处将显示温度值。下列寄存器信息供参考。

如果将NTC 热敏电阻连接到控制器的NTC引脚,则可以实现过温保护。当模块检测到温度超过设定值时,即触发过温保护。过温保护被触发时,功率级不会关断;模块会发送故障信号,让用户决定如何处置。
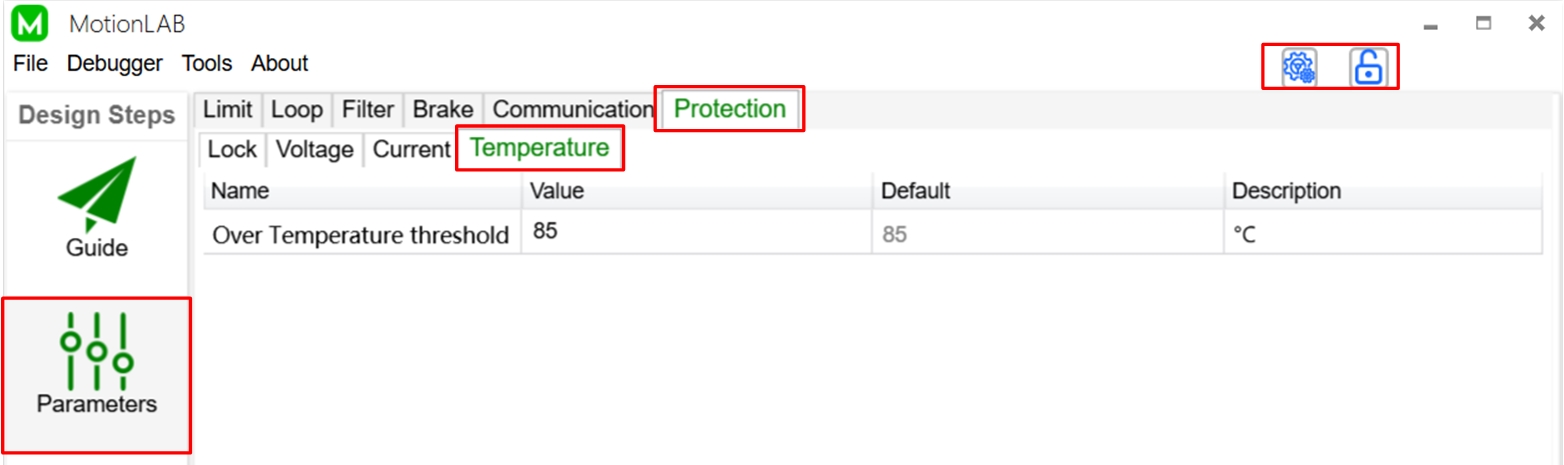
在 MotionLAB 的“Parameters”页面上可以设置过温阈值。点击此处了解“如何设置 MotionLAB”。点击“Parameters”页面上的“Basic/Advanced Settings”按钮可以显示高级参数,点击“Lock/Unlock Parameters”按钮以解锁设置,然后即可配置温度阈值。
配置完成后,可以在“Motor Test”页面评估系统性能,并将设置保存到文件,或在“Load to Motor”页面将设置下载到电机。
使用AccuFilter和陷波滤波器这两种滤波器可以减少振动和噪声。
AccuFilter:AccuFilter 用于滤除位置传感器引入的噪声。位置传感器产生的原始信号被传递到 AccuFilter,AccuFilter 可滤除噪声并将位置信息作为反馈信号输出到控制环路。
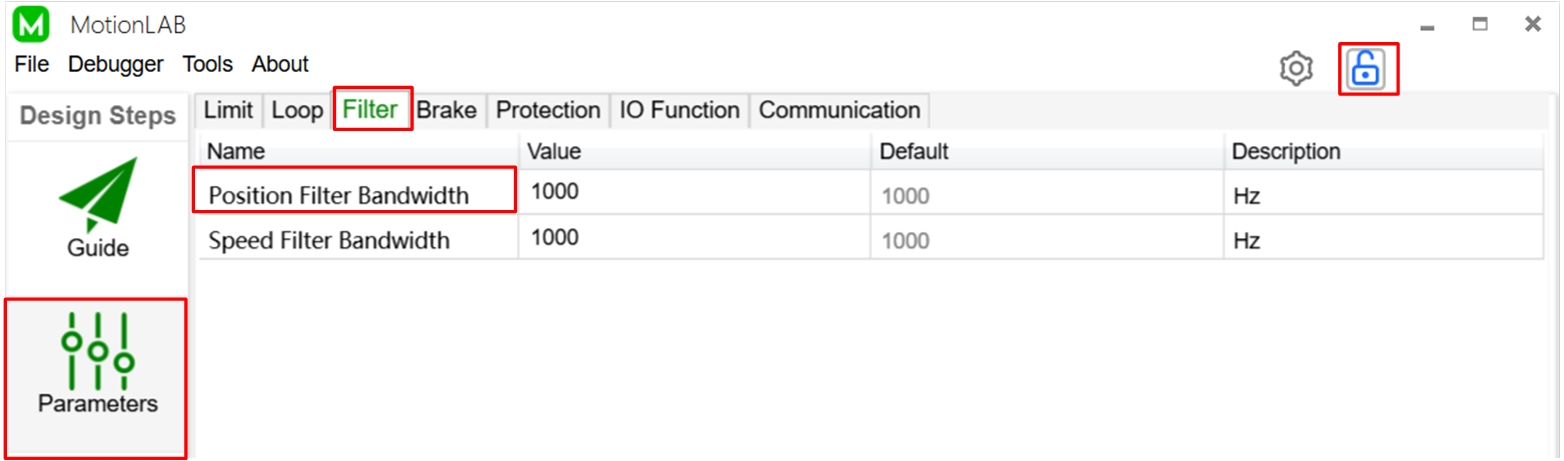
在MotionLAB的“Parameters”页面可设置 AccuFilter 的带宽。点击此处了解如何设置 MotionLAB。点击“Lock/Unlock Parameters”按钮以解锁设置,然后即可配置“Position Filter Bandwidth”的值。通常可将位置滤波器带宽设置为位置环路带宽的10倍以上,以最小化滤波器相位延迟。

陷波滤波器:陷波滤波器用于滤除系统的共振频率。陷波滤波器是一种带阻滤波器,它具有极窄的阻带和极深的滤波深度,需要选择其共振中心频率(Hz)、阻带宽度(Hz)和滤波深度(dB)。
共振中心频率:是要滤除的频带中心频率,通常设置为系统的共振频率。
阻带宽度:是要滤除的频带宽度。
滤波深度:是对共振中心频率的衰减倍数。原始信号通过陷波滤波器后,共振中心频率分量将衰减滤波深度的倍数。
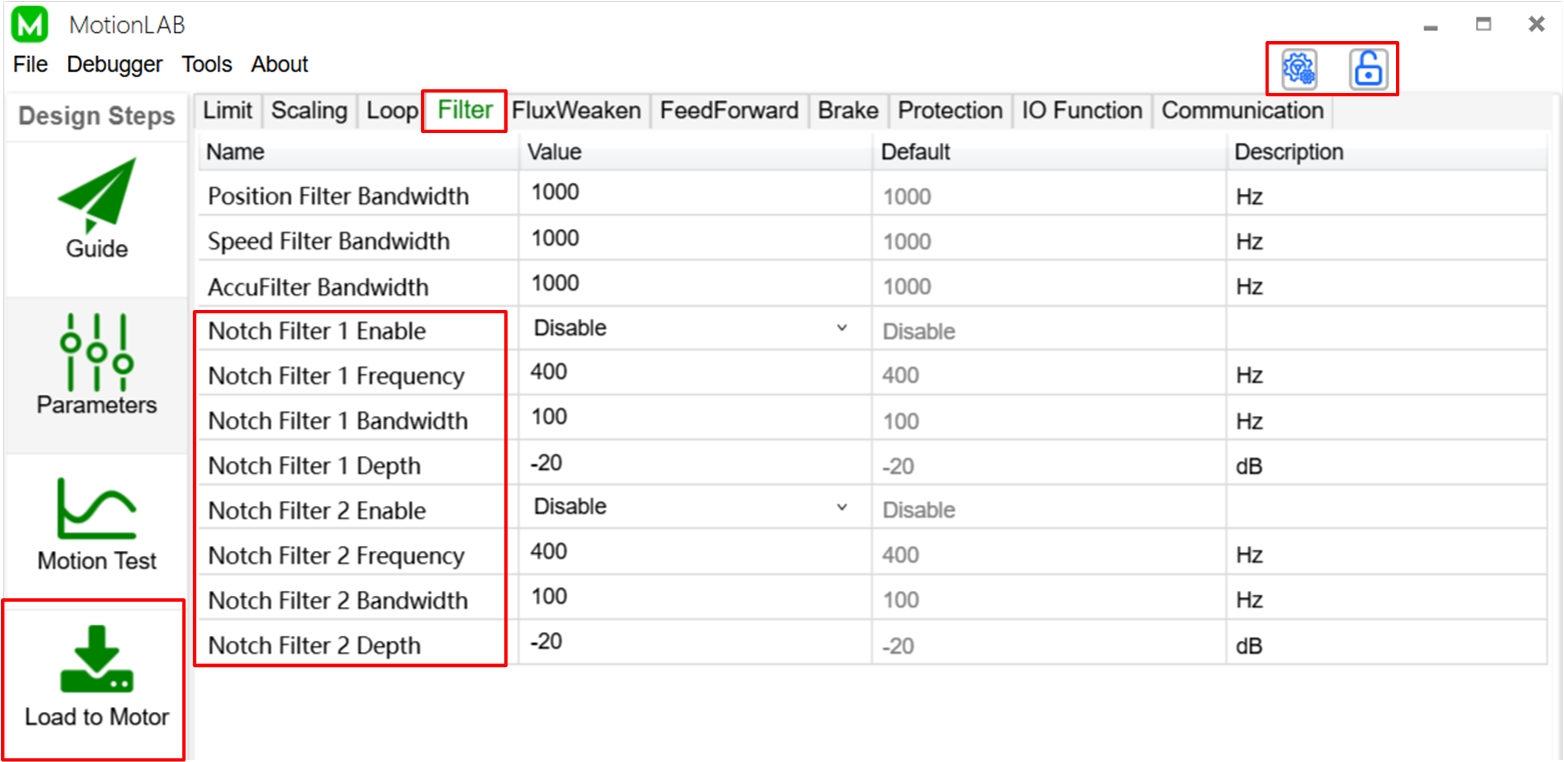
MotionLAB 集成了两个串联的陷波滤波器。在 MotionLAB 的“Parameters”页面可启用它们,并设置共振中心频率(Hz)、阻带宽度(Hz)和滤波深度(dB)。点击此处了解如何设置 MotionLAB。点击“Basic/Advanced Settings”按钮以显示高级参数,再点击“Lock/Unlock Parameters”按钮以解锁设置,即可启用并配置陷波滤波器。
配置完成后,可以在“Motor Test”页面评估系统性能,并将设置保存到文件,或在“Load to Motor”页面将设置下载到电机。
theta 偏置是转子与定子 A 相对齐时的传感器角度。有两种方法可以找到 theta 偏置。一种是通过"Auto Tuning",theta 偏置的测量将包含在自动调谐过程中。点击此处了解如何使用自动调谐方法。
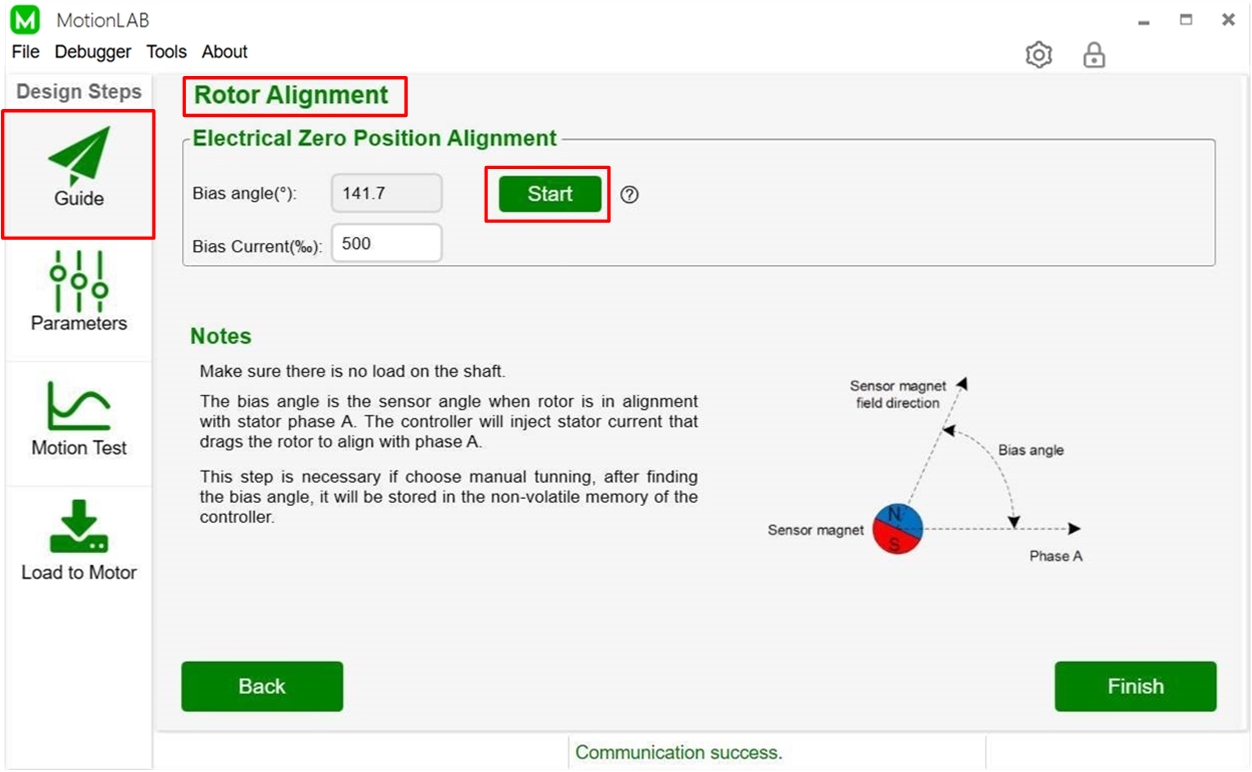
如果选择"Manual Tuning",则需要执行转子对齐步骤以测量偏置角度。在“Guide”页面点击“Manual Tuning”,进入"Rotor Alignment" 部分。点击“Start”按钮后,EZmotion 模块将执行以下步骤来找到 theta 偏置:
1. 向电机绕组施加电流以产生扭矩,并将转子拖动到 300 度电角度,然后读取传感器数据 1。
2. 向电机绕组施加电流以产生扭矩,并将转子拖动到 60 度电角度,然后读取传感器数据 2。
3. 根据传感器数据 1 和传感器数据 2 计算 THETA_BIAS 和 THETA_DIR。
4. 将 THETA_BIAS 和 THETA_DIR 存储到模块寄存器中。
theta 偏置将存储在 NVM(非易失性存储器)中。该操作只需在伺服系统首次设置时执行一次。通过“Register Access Tool”可以读取该值。在工具栏中找到 Tools -> Register Access Tool,输入 theta 偏置的寄存器地址并点击“Read”按钮,“Data”处将显示其值。如下寄存器信息供参考。

Validate your login
登录您的账号
创建新账号