伺服电机的瞬时模式切换
Charan Bhamra
引言
本文讨论了伺服电机系统中的控制模式瞬时切换功能。闭环伺服控制系统有三种基本控制模式:扭矩、速度和位置。这几个参数中的每一个都可以根据应用需求来单独控制。有些应用可能只需要单一控制模式,但很多高级应用则可能需要在同一运动操作中用到多种控制模式。
在大多数传统伺服控制系统中,必须在完成既定运动之后才能切换到其他控制模式。否则,驱动信号就可能出现尖峰或绕组电流显著下降,从而对运动曲线的性能产生负面影响。对于需要不间断使用多种控制模式的应用来说,设计就变得很复杂。
瞬时模式切换
EZmotion推出的第二代伺服电机和控制器提供了多款支持瞬时模式切换的产品(见表1)。
表1:EZmotion伺服电机和控制器
| EZmotion 产品系列 | 产品型号 |
| MMS760xxx 系列 | MMS760200-48-C2-1 |
| MMS760400-48-C2-1 | |
| MMS760200-48-R2-1 | |
| MMS760400-48-R2-1 | |
| MMP760xxx 系列 | MMP760100-75-C2-1 |
| MMP760100-75-R2-1 | |
| MMP760100-75-E2-1 | |
| MMP760200-75-C2-1 | |
| MMP760200-75-R2-1 | |
| MMP760200-75-E2-1 | |
| MMP760400-75-C2-1 | |
| MMP760400-75-R2-1 | |
| MMP760400-75-E2-1 |
这些电机和控制器提供瞬时模式切换功能,能够在电机运行过程中无缝切换多种控制模式。瞬时模式切换也可以归类为伺服控制模式之间的无扰切换。无扰切换通常适用于比例积分微分(PID)控制中手动模式和自动模式之间的切换,它同样适用于伺服电机控制。
在EZmotion伺服电机和控制器的嵌套回路控制结构中,所有控制信号的反馈都被持续监控。通常,三个控制回路中只有一个连接到输出信号,但未连接的控制回路也可以像连接到输出信号一样地运行。因此,在切换控制模式时,电机可以在不同的控制回路之间平稳过渡,而不会出现输出控制信号的跳跃。
瞬时模式切换的优势
瞬时模式切换在各种应用中都具有显著的优势,特别是在涉及工业自动化、控制系统和制造业领域。在这些应用中,保持连续和平稳的运行对于保证产品质量和一致性非常重要。而瞬时模式切换具有的以下优势有助于避免干扰,从而保证整体运动过程的效率。
• 允许在所有控制模式之间无缝转换
• 在切换控制模式期间仍保持调谐和回路参数
• 在切换操作期间仍提供出色的稳定性和性能
• 为应用部署高级控制算法提供额外的灵活性和功能
• 在触觉力反馈控制方案中非常有用
定义和比较指标
电机绕组中的电流通常负责扭矩的产生和旋转。在三相磁场定向控制(FOC)中,三相电机系统被简化为两轴直接-正交-零(DQZ)变换参考系统。最小化D轴电流 (ID) 与转子极轴平行,不负责扭矩产生。最大化Q轴电流 (IQ) 与转子极轴垂直,负责电机中的扭矩产生。
具有三重级联回路控制的FOC是实现电机控制中无缝模式切换的基础。在三重级联回路配置中,每个回路都负责调节系统的不同方面,如电流、速度和位置。一个回路的输出被用作另一个回路的定位点,从而产生级联效应。
图1展示了EZmotion伺服电机中使用的级联控制回路结构。

图1:EZmotion伺服电机中的级联控制回路
IQ反馈是体现电机系统性能和稳定性的有效指标。我们通过检查和比较模式切换期间的 IQ 反馈来评估电机的无缝模式切换性能。
图2展示了模式切换期间的控制输出信号。通过瞬时模式切换,电机以3000rpm的目标速度和10000rpm/s的加速度启动,处于速度控制模式。在5秒时,电机无缝切换至位置控制模式,速度为1000rpm。在位置模式下运行几秒钟后,电机过渡到扭矩控制模式,目标扭矩设置为电机额定扭矩的20%。最后,电机切换回速度控制模式,目标速度为3000rpm。

图2:模式切换期间的控制输出信号
如图2所示,在模式切换期间,IQ 信号中没有观察到尖峰和波动,且切换后相应的控制输出信号也被适当地控制到与参考信号一致。瞬时模式切换让电机在物理上保持了稳定,且观察不到抖动或弹跳行为。相比之下,不具备无缝模式切换功能的传统电机在实际的操作模式切换期间则会产生抖动或弹跳现象。IQ尖峰甚至可能触发故障或保护功能,从而导致电机运行突然暂停。
应用示例
协作机器人(Cobot)送料或插入应用
协作机器人送料和插入应用要求协作机器人精确放置零件并施加精确的插入力。在这类应用中,伺服电机先在位置控制模式下运行以对齐零件,然后切换到扭矩模式以施加适当的机械插入力。无缝模式切换使协作机器人能够在位置和扭矩模式之间平稳过渡,同时保持稳定性和高性能。例如塑料夹插入应用,夹子必须放置在既定的位置和深度,然后以精确的插入力压入配合的组件中。图3展示了工业协作机器人在插入和压入过程中的示意图。
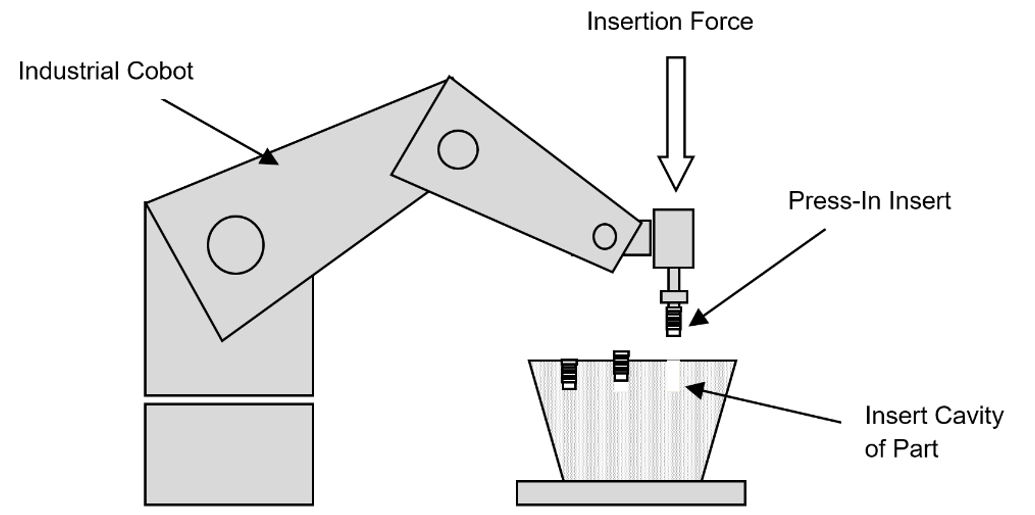
图3:工业协作机器人应用中的插入和压入过程
自动化离心机系统
离心机系统利用离心力并根据密度实现液体、气体和固体物质的分离。与拾放机器交互工作的自动化离心机必须在离心过程中精确控制速度,并在停止时进行精确的位置控制。在离心机分离的过程中,装有样品的转子以设定的速度旋转一段时间,然后无缝转换到位置模式。在单一运动操作中,转子被停在目标位置。停止位置必须十分精确,才能实现拾放机器人将样品装载或转移到指定的位置。图 4 显示了集成拾放机器人的离心机系统。

图4:集成拾放机器人的离心机系统
晶圆旋转冲洗干燥机(SRD)系统
旋转冲洗干燥机(SRD)是通过一系列循环操作(包括冲洗、吹扫和干燥)来清洁并干燥半导体晶圆的设备。装有晶圆的盒式托盘被安装在SRD腔室内的转子上。这个负载平衡的转子负责晶圆清洁过程中的旋转运动。冲洗、吹扫和干燥循环在速度控制模式下以给定速度运行一定时间。所有循环完成后,固定晶圆的转子需要在位置控制模式下停止在直立位置,且整个过程无中断。瞬时模式切换可以实现速度和位置控制模式之间的无缝过渡,从而在单次运动操作中完成SRD过程。
图5展示了用于晶圆清洁的SRD系统示意图。

图5:用于晶圆清洁的SRD系统
结语
本文展示了EZmotion的MMS760xxx系列和MMS740xxx系列产品,以及它们如何通过瞬时模式切换在伺服电机系统中实现不同控制模式之间的即时无缝过渡,且无明显的延迟。在这些产品中,控制回路中的所有控制信号反馈都被持续监控,从而实现了能够满足严格模式切换要求的灵活电机系统。平稳、不间断的伺服电机运行能够提高工业自动化应用的整体效率,特别是在送料和插入应用、自动化离心机系统以及晶圆SRD系统等场景中。
Validate your login
登录您的账号
创建新账号