比较研究:步进电机与无刷直流电机
Charan Bhamra
引言
对于工作在现代应用领域的工程师和设计师来说,了解步进电机和无刷直流(BLDC)电机的优缺点非常重要。本文将对广泛应用的混合式步进电机和三相BLDC电机进行比较,以说明这两类设备各自具备的优势。
文章将阐述两种电机的工作原理(包括物理尺寸和功率密度等),通过在各种负载条件下进行实验,观察每种电机的加速度和噪声情况,并比较其功率、效率和温度的变化。
工作原理
步进电机
混合式步进电机是应用最广泛的一种步进电机。它由永磁转子和电磁定子组成。转子有两个带永磁体的杯状结构:一个带北极,另一个带南极。图 1 展示了混合式双极步进电机的简化工作原理。
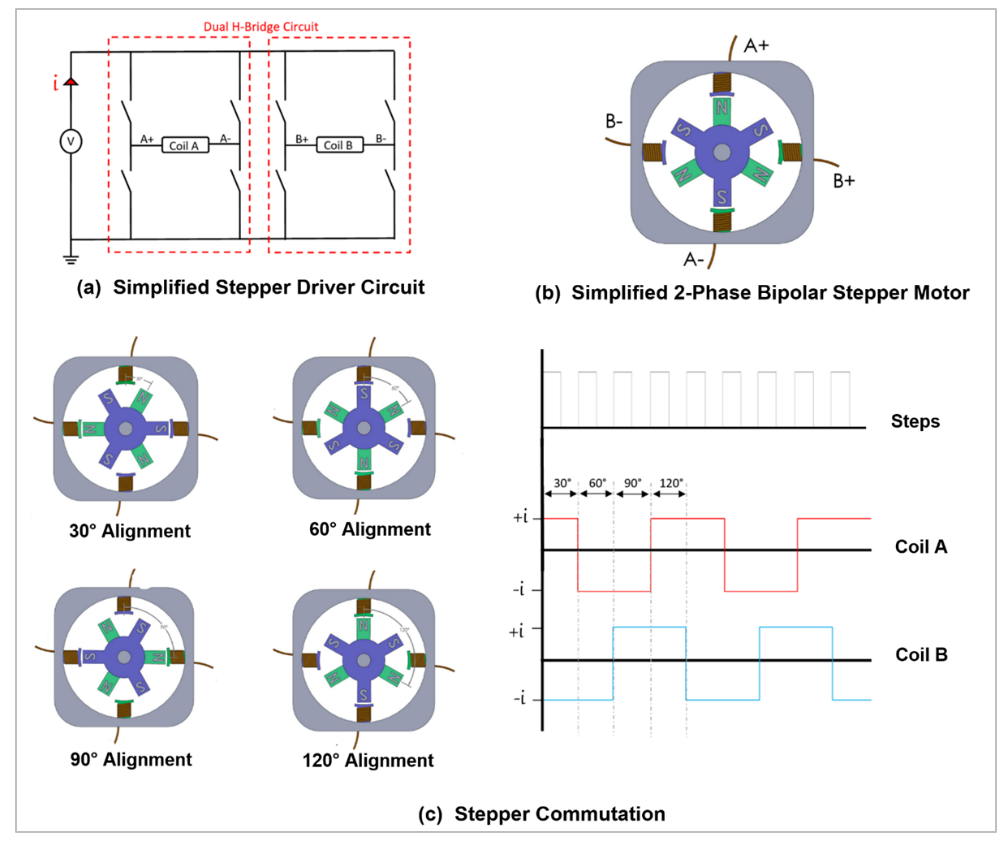
图 1:简化的混合式两相双极步进电机
这个简化的步进电机其转子由两个永磁体杯组成。每个杯上都有三个齿,分别对应一个磁极。两个杯错开半个齿距(60°)组装。定子由四个磁极和两个相位绕组组成。
步进电机通过电子换向。根据输入的步进脉冲,双极步进电机驱动器通过一个双 H 桥电路(如图1中的(a)所示)按顺序为定子磁极通电,从而使转子旋转一个步进角。步进角可以通过公式 (1) 计算得出:
$$Step Angle (in°) = \frac {360}{2 \times (n_{ROTORTEETH})(n_{PHASE})}$$每一个步进脉冲使转子旋转 30° ,这种步进电机被称为 12步全步进电机。在全步进运行期间,换向顺序和转子位置都遵循特定的顺序(如图 1 中的(c)所示)。市面上的大多数步进电机都具有 50或100个极对,转子转一圈共有 200或 400个全步进,步进角可小至 1.8° 或 0.9°。
通过先进的步进电机驱动器,小步进角可以通过微步进操作进一步细分为更小的角度,例如通过半步、1/4步,甚至1/256步来进一步减小步进角。步进电机能够以如此小的角度步进,因此能够提供卓越的定位精度。
无刷直流 (BLDC) 电机
无刷直流电机也具有永磁转子和电磁定子,并需要电子换向。图 2展示了BLDC电机以及一个单极对 3 相 BLDC的简化工作原理(分别如图 2 中的 (a) 和 (b)所示)。
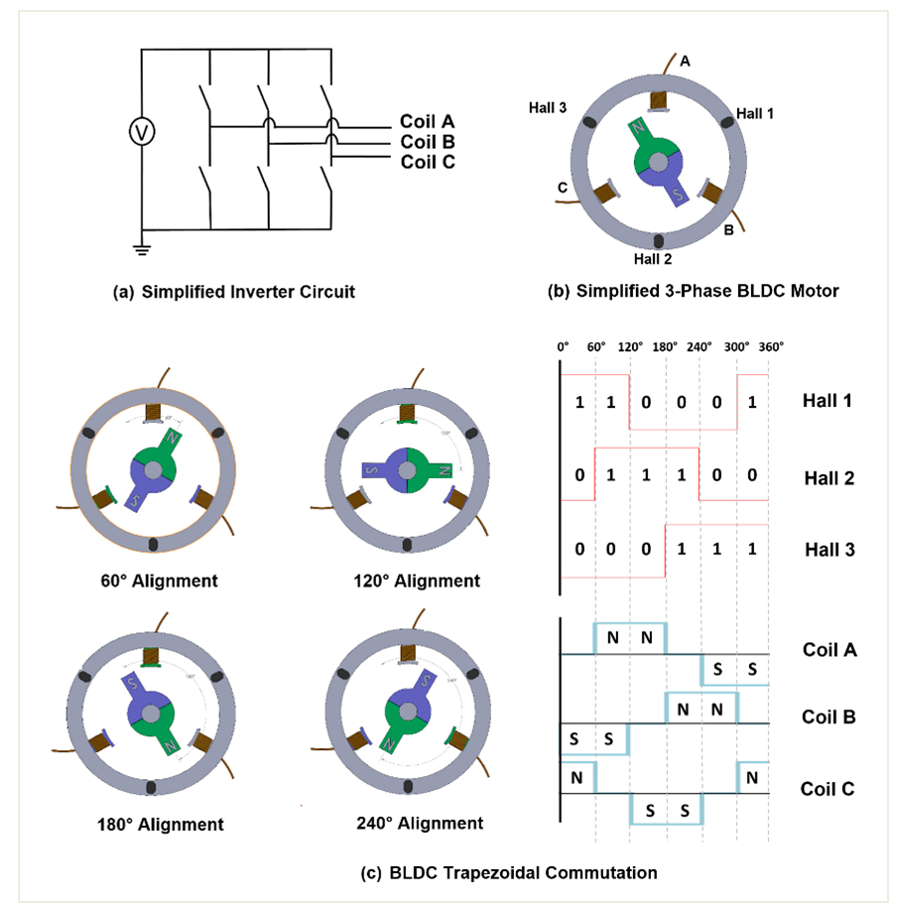
图 2:简化的三相BLDC电机
无刷直流电机的换向需要知道转子的瞬时位置。霍尔效应传感器可以被用来提供转子的角度位置。该位置信息被馈送至微控制器 (MCU),由微控制器通过三相逆变器电路来切换相位绕组电流。从本质上来讲,即直流输入电压被转换为三相交流电压,然后通过逆变器电路(如图 2 中的 (a)所示)依次激励定子磁极。
转子磁场始终追随定子磁场,从而使BLDC电机旋转。本例中的简化电机为单极对 BLDC,因此每个换向步进都为 60 度电气和机械角度,由此可以获得BLDC梯形换向和转子位置(如图 2 中的 (c)所示)。但是,典型梯形换向使电机容易受扭矩波动的影响。因此,可在BLDC上采用一种称为磁场定向控制 (FOC) 的高级换向法进行测试。FOC 可以实现最小的扭矩波动和平稳的电机运行。
实验装置
步进电机测试
设置步进电机测试时,可使用 NEMA 23 双极步进电机和磁粉制动器进行负载模拟。电机测试需要的五个主要组件及其功能描述如下:
• 编码器:安装在磁粉制动器的另一端,用于监测轴的转速。
• 双极步进电机驱动器:具有并行输入、内部电流感应和调节功能,用于控制步进电机。
• 24V DC台式电源:与电流表串联以测量不同负载条件下步进电机的直流电流消耗,同时为步进电机驱动器供电。
• 电机驱动器的MotionLAB:兼容串行外设接口 (SPI),可配置步进电机驱动器的参数,例如步进模式、额定电流和其他电机设置。
• 函数发生器:向驱动器发送方波脉冲以驱动电机转动。
图3展示了步进电机实验装置的功能框图。

图 3:步进电机的实验装置
无刷直流电机测试
与步进电机测试相类似,无刷直流电机测试装置中包括了用于模拟负载的磁粉制动器,以及带集成控制器的 NEMA 17 BLDC。EZmotion的 MMS742038-24-R1-1是一款一体化电机控制解决方案,它包含了一个内置功率级驱动器以及带有嵌入式位置传感器的 FOC 控制器。
为给控制器供电,实验采用了24V直流台式电源,它与电流表串联以测量无刷直流电机在不同负载条件下的直流电流消耗。通过MotionLAB GUI 可以驱动BLDC在速度控制模式下运行以进行测试。
图4展示了无刷直流电机实验装置的功能框图。
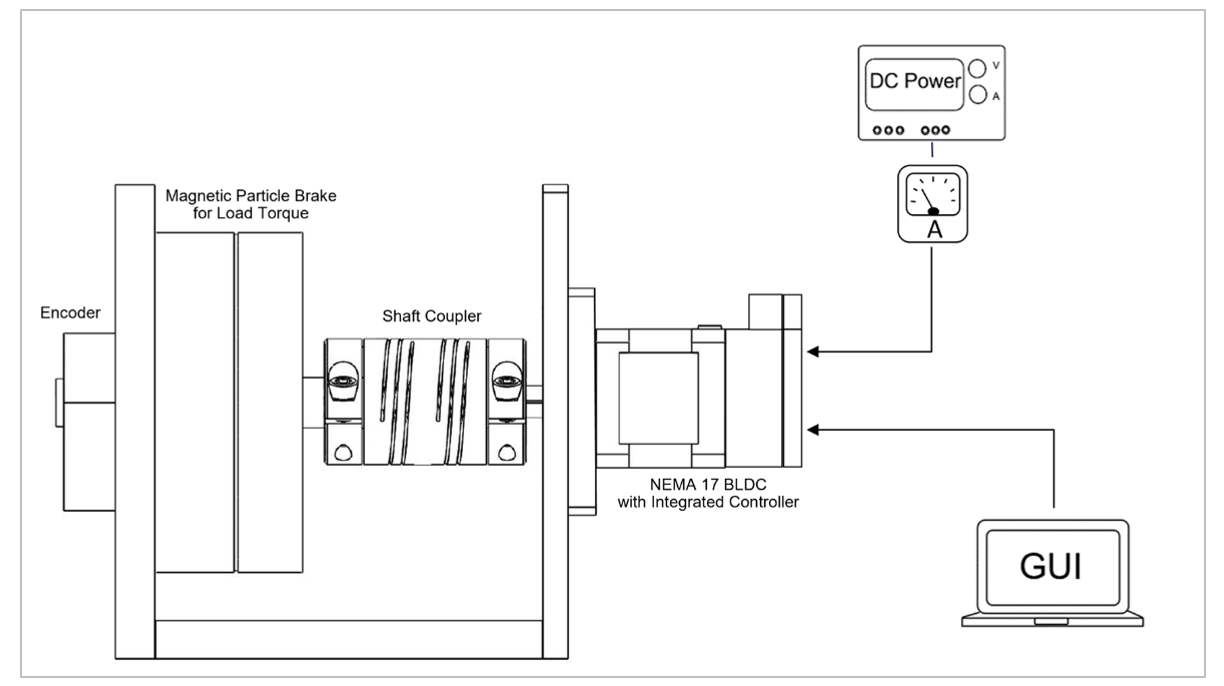
图 4:BLDC 电机实验装置
直流电流消耗比较
步进电机通常在恒定电流(也称为恒定扭矩)下运行。这让步进电机不管电机轴上的负载如何,都需要始终吸收最大电流。因此,步进电机可以在低速范围内提供最大扭矩。但与此同时,这也会导致绕组以热量的形式浪费大量能量。
在本实验中,我们在三种微步进分辨率下对步进电机进行测试:半步、四分之一步和八分之一步。在三种不同负载条件下(无负载、 8.2N-cm、 11.5N-cm),各种电机速度下的直流电流消耗情况如图 5 所示。实验结果表明,与BLDC电机相比,步进电机实测直流电流消耗效率较低。
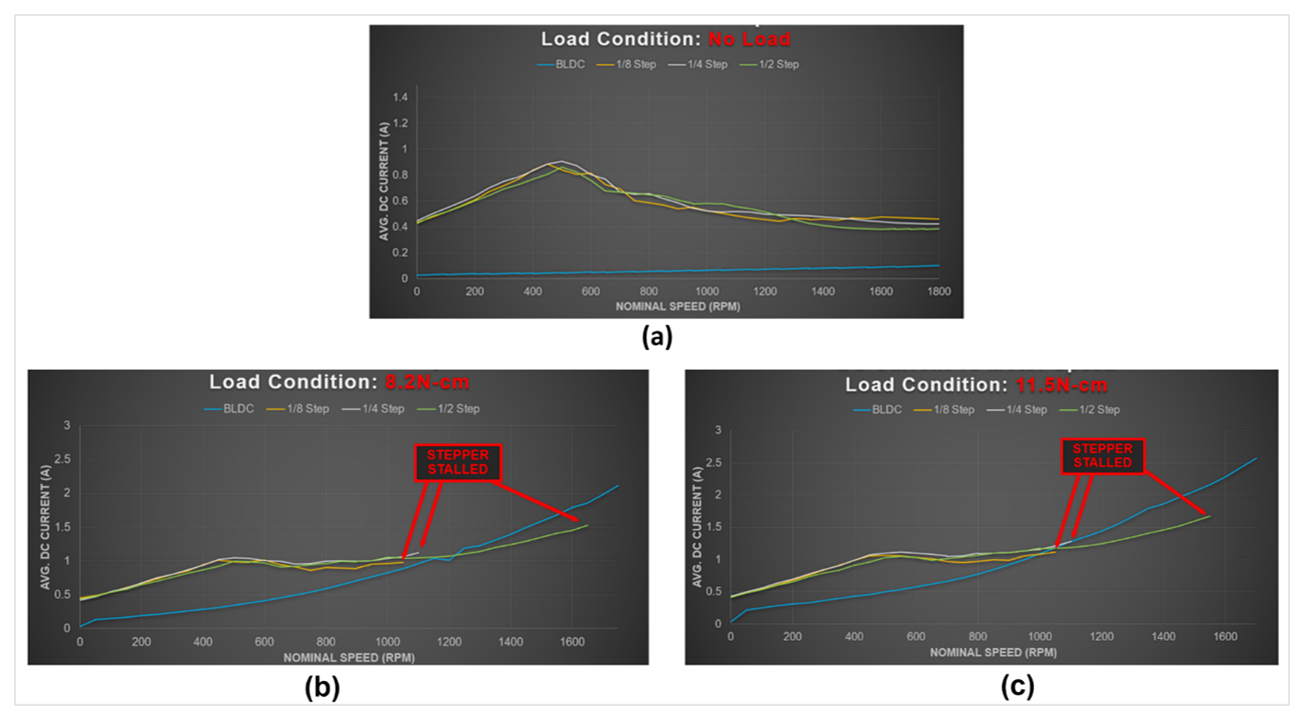
图 5:不同负载条件和不同电机转速下的直流电流消耗
图5a展示了无刷直流电机、半步进电机、四分之一步进电机和八分之一步进电机的空载电流消耗。即使在没有机械操作的情况下,步进电机的零速电流消耗也明显高于 BLDC。此外,步进电机的电流消耗在低速范围内始终较高,直至电机速度增大到高速范围,电流消耗才因电机绕组的电感和反电动势开始下降。
图5b和5c展示了当轴上增加了负载时,无刷直流电机、半步进电机、四分之一步进电机和八分之一步进电机的电流消耗。步进电机在高速下可能因为绕组电流太低而失速。尽管微步进电机可以提高电机的位置分辨率,但同时也会降低输出扭矩。八分之一和四分之一步进电机在中速时会失速。与此同时,BLDC 电机则仅根据轴上的负载消耗所需的电流。
在空载条件下,BLDC会消耗非常少的电流来旋转转子。如果轴上的负载增大,电流消耗也会增加,以使BLDC电机以比步进电机更高的速度继续旋转。BLDC电机能够根据负载情况消耗电流,因此它比步进电机能效更高。
功率密度比较
功率密度是用于衡量电机单位体积输出功率的指标。无刷直流电机的功率密度通常高于步进电机。图 6 展示了BLDC和步进电机的关键尺寸数据。
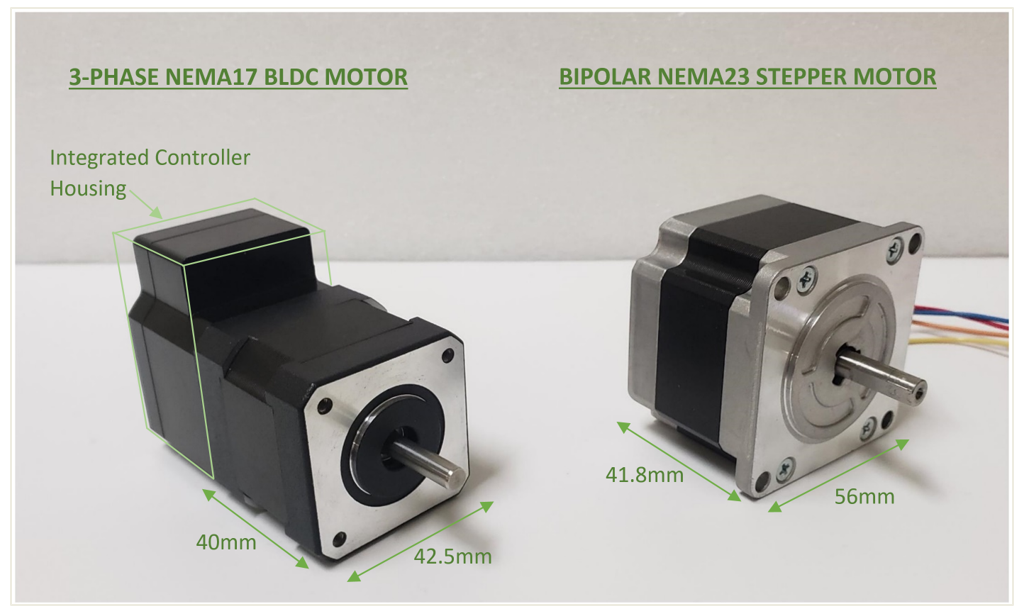
图6: MMS742038-24-R1-1和通用步进测试电机的关键尺寸
通过这些尺寸,我们可以估算出BLDC 电机的体积为 73cm3 ,步进电机的体积为131cm3 。电机的输出功率等于输出速度乘以输出扭矩。在相同负载条件下,BLDC 电机的持续旋转速度比步进电机快,这意味着BLDC电机的功率密度更高,因为它体积更小,输出功率更高(如图5b和5c所示)。在无人机和四轴飞行器等空间有限且功率要求较高的应用中,功率密度是非常关键的参数。
温升比较
如前所述,步进电机的恒流操作会导致绕组中的大量能量损失,这些能量主要以热量的形式损耗。在实验期间,我们在22°C的环境温度下测量电机机身温度。图 7 展示了电机机身温度随时间上升的测量结果。
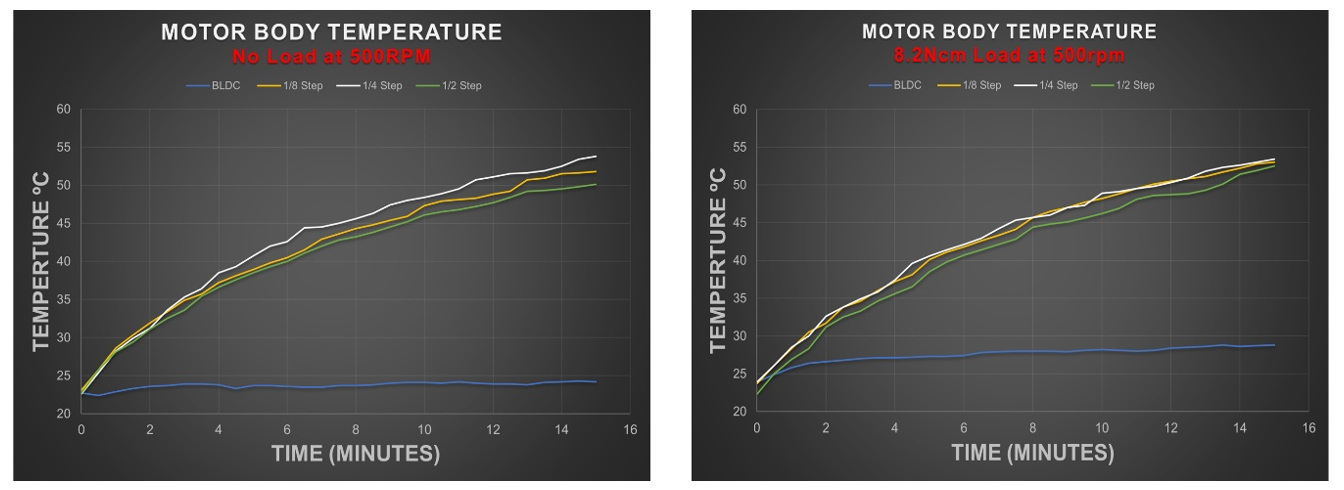
图 7:电机机身温度随时间上升 (TAMBIENT = 22°C)
无论电机轴上的负载多大,步进电机的温度都会稳步上升。相比之下,无刷直流电机由于无需过多电流,因此电机温度只会略微上升,它将大部分输入功率都转化成了机械功率而不是热量。因此,对于步进电机应用,采用适当的散热解决方案是十分必要的。
加速度和噪声比较
步进电机的高极数直接决定了其定位精度优于无刷直流电机。然而,高极数也会导致加速度受限和运行时噪声较大。因为需要逐步提高电机速度才能维持轴的角度定位精度,因此步进电机的加速可能会比较困难。如果加速太快,将可能面临失步的风险,这在许多应用中都是灾难性的;如果输入电流低而加速度要求高,则可能失速。
在噪声方面,无刷直流电机和步进电机都会产生一种特定的扭矩,称为齿槽扭矩。这种扭矩在步进电机旋转的每一步都会引起振动和振铃。由于BLDC的电流消耗与轴上的负载成正比,在电机额定速度范围内,BLDC可以消耗额外的电流来加速负载。它在正常运行期间比步进电机要安静很多。相比步进电机,BLDC 电机是一种更可靠、更高效的解决方案,可提供高速度、高加速度和更低的可闻噪声。
结语
本文回顾了步进电机和无刷直流电机在不同负载条件下的直流电流消耗以及电机温升实验,并讨论了这两种电机的优缺点。在恒流操作期间,无论负载多大,步进电机都比无刷直流电机浪费更多的能量。而且步进电机在高速范围内不会产生高扭矩,还会向周围环境散发更多热量。因此,应用步进电机需要进行适当的散热设计。
BLDC电机的定位精度与角度传感器精度成正比,集成高分辨率角度传感器的BLDC电机可以提供更出色的定位精度。步进电机借助微步进模式可以提供比无刷直流电机更高的定位精度,但这也带来了一个缺点,即从中速开始,步进电机提供的扭矩较小,这可能导致失步或失速。步进电机还缺乏快速加速的能力,而且产生的噪声比BLDC电机大。总而言之,步进电机是性价比相对较高的解决方案,但仅限于低速应用;BLDC 电机则是一种更可靠、更安静的解决方案,在宽速度范围内能够提供更高的效率和精度。
Validate your login
登录您的账号
创建新账号